
Robotic Prosthetic Ankle Controller
VA Hospital R&D / Master's Thesis
Links
Project Goal
The main goal of this project was to develop a personalized and adaptive control scheme for powered ankle-foot prostheses. Individuals with below-knee amputation generally have gait patterns that are more asymmetrical about their two limbs when compared to the general population. This is likely due to a lack of proper prosthetic ankle function. It has been observed that these individuals compensate for this lack of mobility in ways that can lead to a host of long-term musculoskeletal impairments (e.g., osteoarthritis in the knee and hip of the intact limb).
Powered prostheses have the ability to better emulate biological ankles since they are capable of generating power, unlike clinically-prescribed limbs that are completely passive and can only return stored energy. However, current powered prosthesis control methods are over-reliant on able-bodied data, require extensive amounts of tuning by experts, and cannot adapt to each user's unique walking behavior.
Challenges
Common challenges for prosthesis controller designs include: (1) accounting for personalized altered body mechanics of the user, (2) avoiding manual tuning of subject-specific control parameters, and (3) designing a control law that automatically adapts to the user and environment. Additionally, many control approaches rely on finite states and are not continuous or adaptive to variable conditions.
The Solution
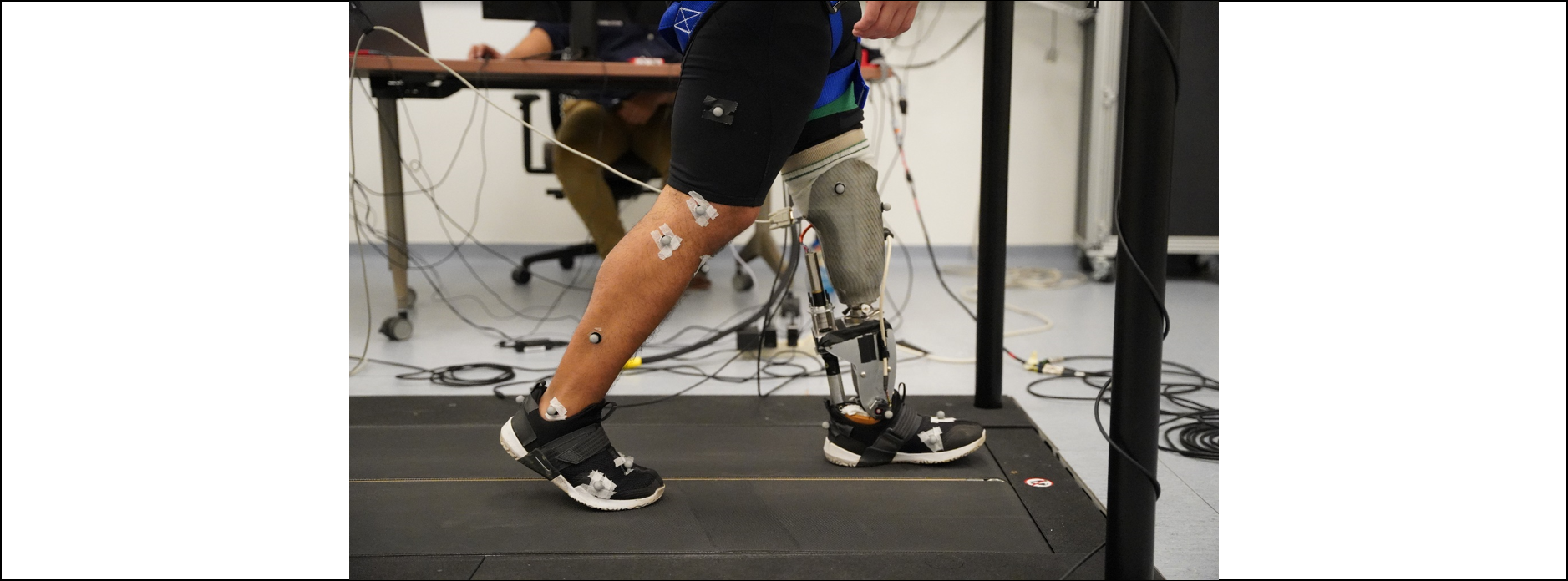
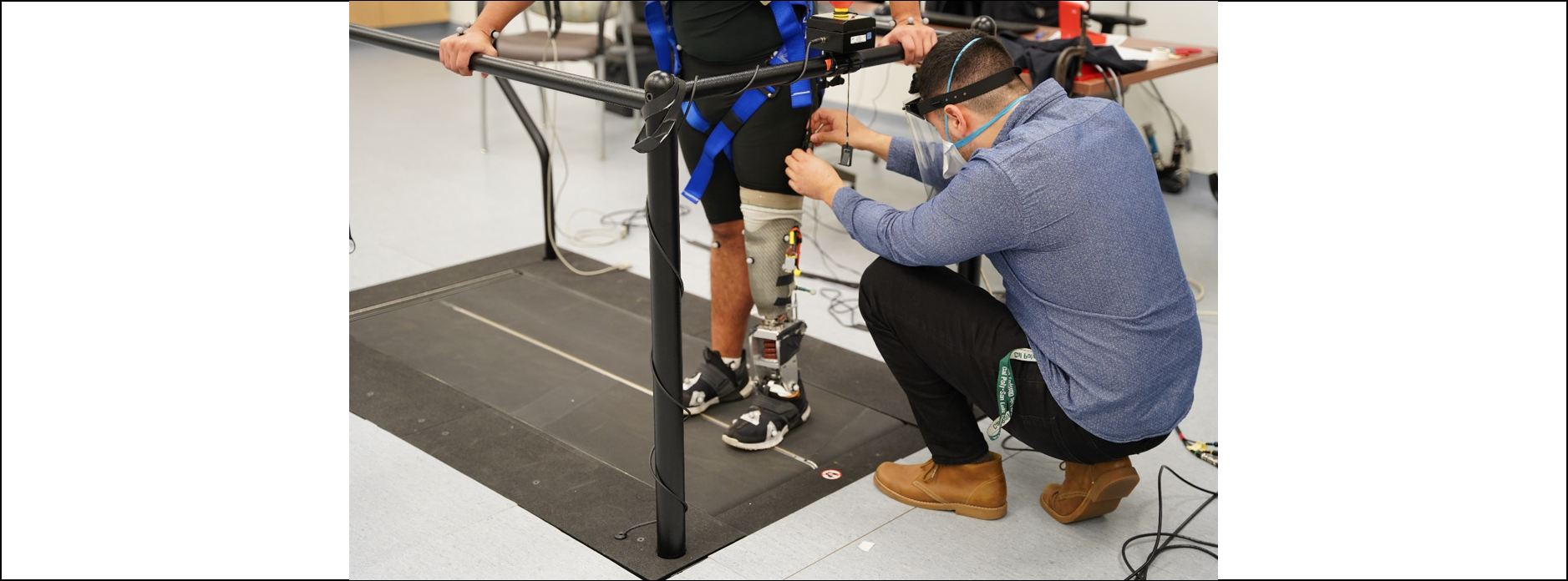
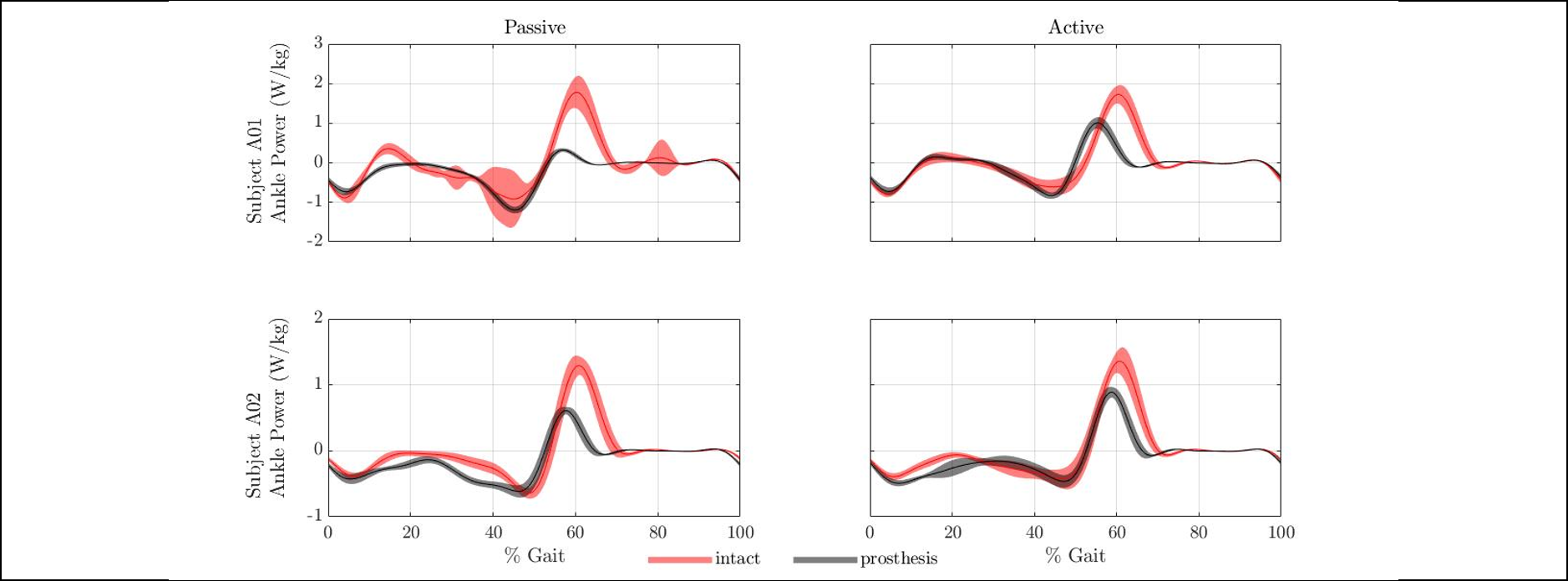
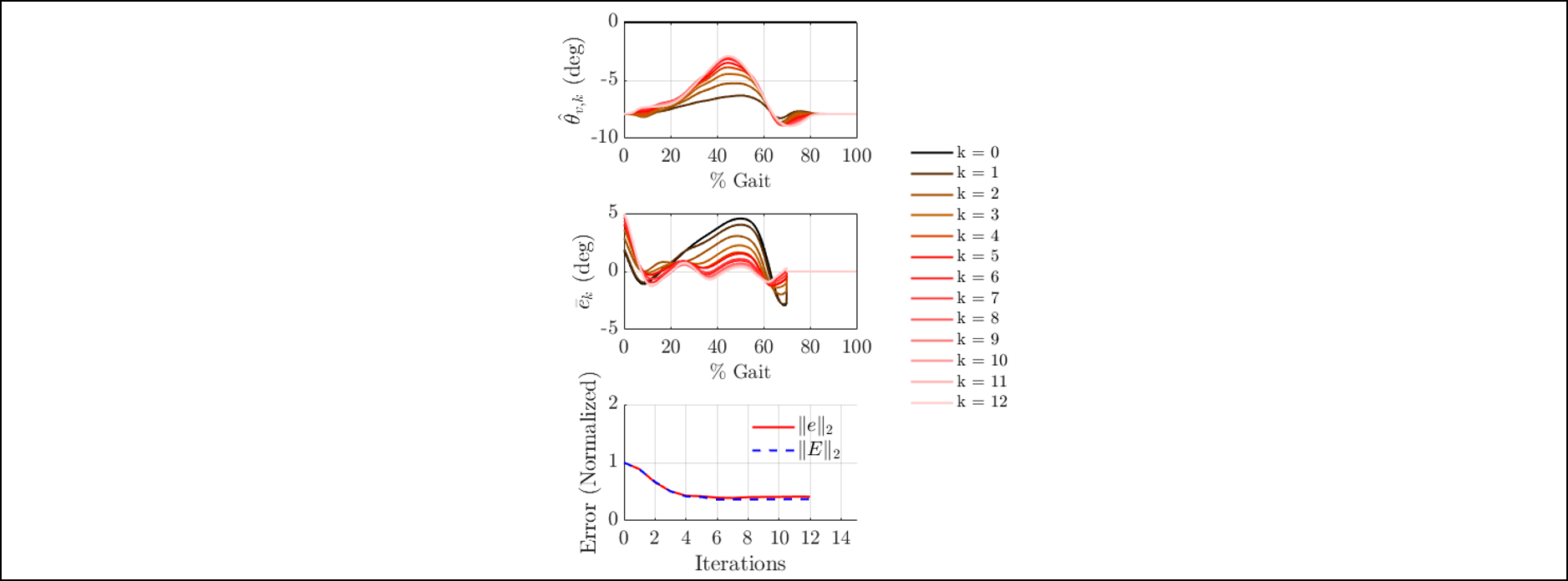
This work directly addresses all the listed limitations with a personalized and data-driven control strategy. The controller utilizes time-invariant control signals enabled by phase-based state estimation and an iterative learning strategy that adjusts the impedance characteristics of the prosthetic ankle to match the dynamics of the intact ankle. The controller was experimentally evaluated on two individuals with transtibial amputation.
The control scheme successfully increased ankle angle symmetry about the two limbs by 25.3%. In addition, the symmetry controller significantly increased peak prosthetic ankle power output at push-off by 110% and significantly reduced loads on the intact limb commonly associated with osteoarthritis. This research demonstrates the benefits of personalized and data-driven symmetry controllers for powered prosthetic limbs.
Notable Features & Accomplishments
- Data-driven iterative learning control utilizing adaptive learning gains and controller personalization
- Continuous state estimation based on wearable sensors, coordinate transforms, adaptive parameters, and PCA
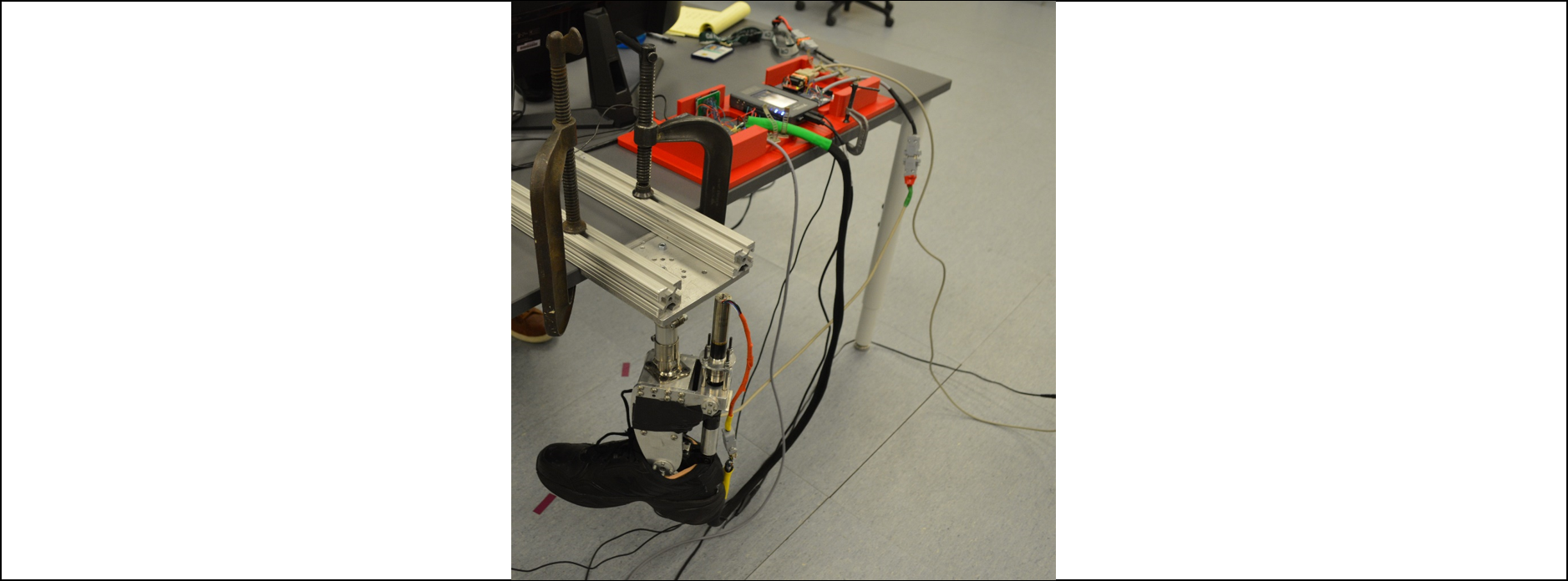
- First-principles inverse model of the actuator
- Real-time code written in LabVIEW for executing deterministic control laws, sensor fusion, signal processing, data logging, and user commands via a wireless network
- Custom embedded system which encloses circuitry, sensor interfaces, microcontrollers, shielding, and power connections within a 3D-printed case
- Extensive evaluation of the control scheme including simulations, bench testing, HW/SW-in-the-loop testing, statistical analyses, and human subject data collections
Skills Used
- Robotic System Design
- Real-Time Control
- Adaptive Control
- Adaptive Learning Algorithms
- Trajectory Optimization
- State Estimation
- Nonlinear Systems
- Embedded Systems
- Microcontrollers
- Motor Control
- Mechatronics
- 3D Printing
- Machining
- Troubleshooting
- Sensor Integration
- Signal Processing
- Bench Testing
- Field Testing
- HW/SW-in-the-Loop Testing
- Frequency Analysis
- Robotics Middleware Design
- Software Architecture Design
- Plant Modeling
- LabVIEW
- MATLAB
- Data Acquisition
Citation
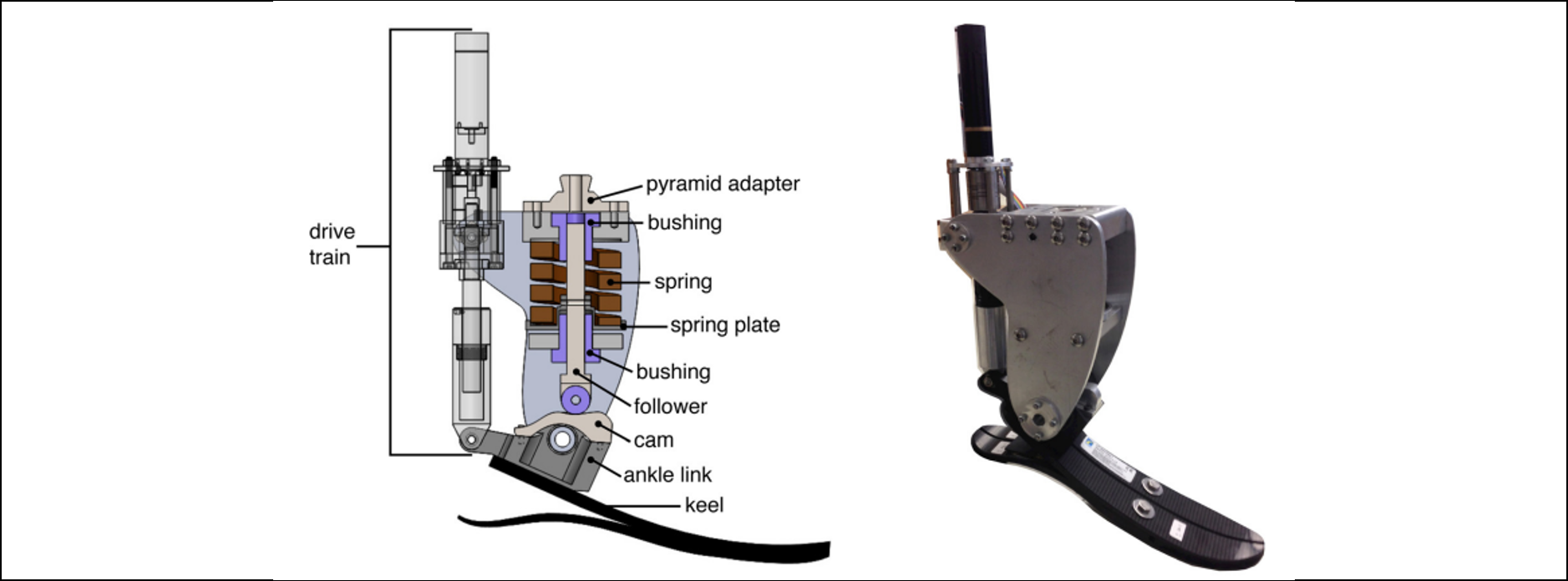
Image that includes prosthetic device rendering and photo adapted from Jonathan Realmuto's Ph. D. Dissertation: "Towards personalized powered ankle-foot prostheses"